You read in Chapter 11 (Working with Roller Chain and Sprockets) about how roller chain and sprockets can be used to transfer power between rotating shafts. In this project, you'll do exactly that for the project robot. First, you'll make and install the tensioner blocks. Then, you'll size the chain and install it. Finally, you'll add any spacers, if necessary, to tweak the chain tension. Note: It's likely that the chains will be super oily, so you may want to get some latex gloves from the hardware store, or have lots of clean rags handy.
| Caution: Eye protection is required for all of these operations. Review all of the general power-tool safety protocols described in Chapter 5 of Kickin' Bot, as well as the sections that correspond to the specific tools used below. |
In this part, you'll break the chain to the proper length and install it using a master link, and possibly an offset link. It's a bit unusual to install the tensioners before sizing the chain. Usually, it's the other way around. In this case, we need the height of the blocks to keep the chain up off of the base so that we can pass wires underneath it later.
click on an image to enlarge it
|
|
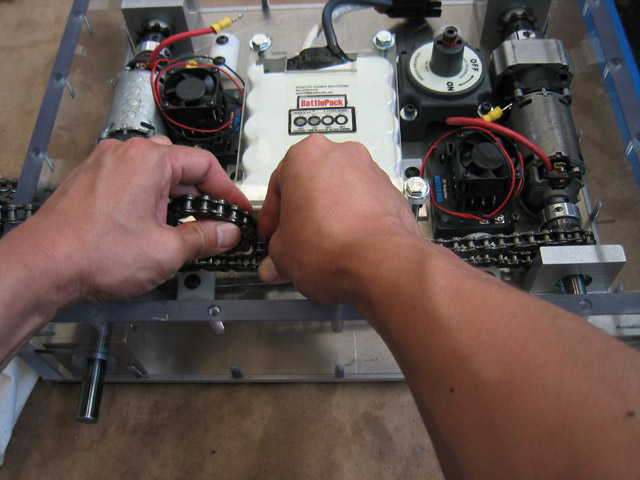
Take the loose end of the chain and thread it around the sprockets. Note that the sprocket connected to the motor won't turn, so you'll have to pull the chain past and wrap it around when you have enough slack. |
|
|
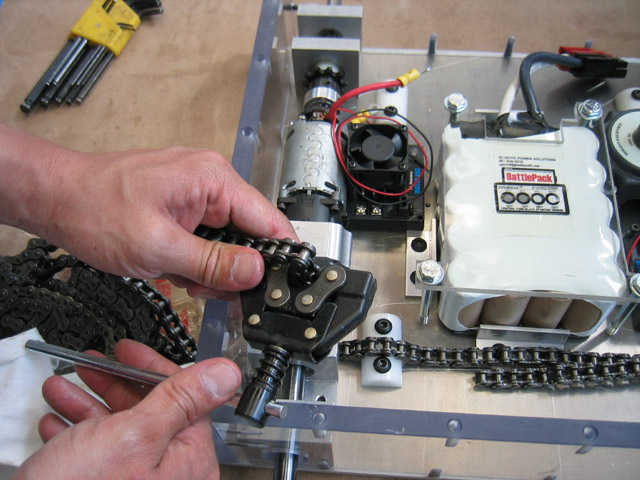
Keeping hold of the link that lines up for a decent fit, break the chain using the technique described in the detailed procedure in Chapter 11. [Note: If the pin gets stuck, then see the Getting Rid of a Stuck Pin tip to help you deal with it.] |
|
|
Use the chain puller and insert the master link as described in the detailed procedure in Chapter 11. |
|
|
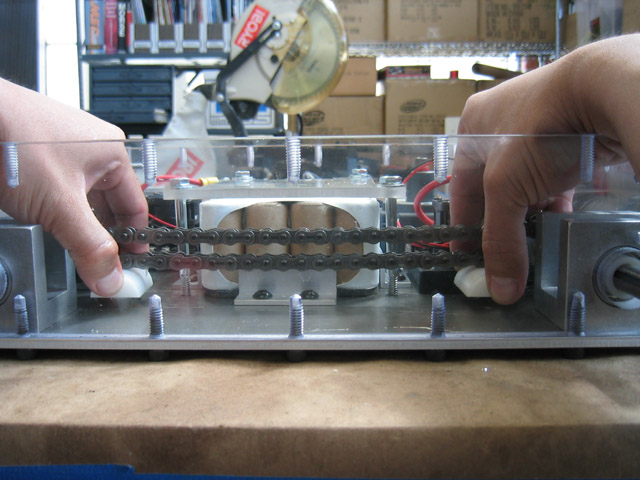
You may find that the chain is a little slack with the master link and tensioners in place, as shown. Not to worry. Next, we'll make some spacer plates to raise the blocks up high enough to correctly tension the chain. |
|
|
This picture shows the amount of height needed under the spacers to take up the slack. [Note: There's a calculation that you can use to find a length for an integral number of links. However, I usually dictate the position of the axles and use a tensioner to take up the slack] |
|
|
|